
Qingmei Zhisu y Linkerbot lanzan conjuntamente un nuevo producto: reductor cicloidal de PEEK
Con raíces en los materiales, dedicado a la fabricación inteligente
Con la misión de "Hacer materiales más ligeros y una fabricación más inteligente", Qingmei Zhisu aprovecha la sólida base de su empresa matriz en ciencia global de materiales para centrarse en la robótica corporal de vanguardia. Ofrece soluciones ligeras integradas para manos diestras, brazos robóticos y cuerpos robóticos, guiadas por los principios de "más ligero, más fuerte y más preciso."
Su principal competitividad reside en cuatro capacidades clave:
1. Selección de materiales e I+D personalizado
Dominio de un espectro completo de materiales que van desde plásticos generales hasta plásticos de ingeniería de alto rendimiento, lo que permite una selección optimizada de materiales y formulaciones personalizadas para articulaciones robóticas, manos diestras, carcasas, sensores y otros componentes con requisitos específicos de resistencia mecánica, térmica y química.
2. Capacidades de diseño y simulación
Un equipo de simulación profesional que utiliza herramientas como ANSYS y Altair para realizar simulaciones estructurales, dinámicas, térmicas y multifísicas en la etapa de diseño, logrando avances dobles en confiabilidad estructural y rendimiento liviano.
3. Moldeo por inyección de precisión y fabricación inteligente
Un taller de moldeo por inyección inteligente totalmente digitalizado equipado con equipos de moldeo de precisión avanzados internacionalmente, sistemas de control de temperatura inteligentes y sistemas de inspección en línea, lo que permite el moldeo de estructuras finas de nivel de 0,1 mm y una producción en masa de alto rendimiento.
4. Capacidad de servicio de extremo a extremo
Una cadena industrial totalmente integrada que abarca "selección de materiales, simulación de diseño, moldeo/mecanizado de precisión, ensamblaje, pruebas de rendimiento y entrega en masa". Permitiendo una respuesta rápida desde la creación de prototipos hasta la producción a gran escala y acortando significativamente el tiempo de comercialización.
Reemplazar el acero por plásticos: un futuro más ligero
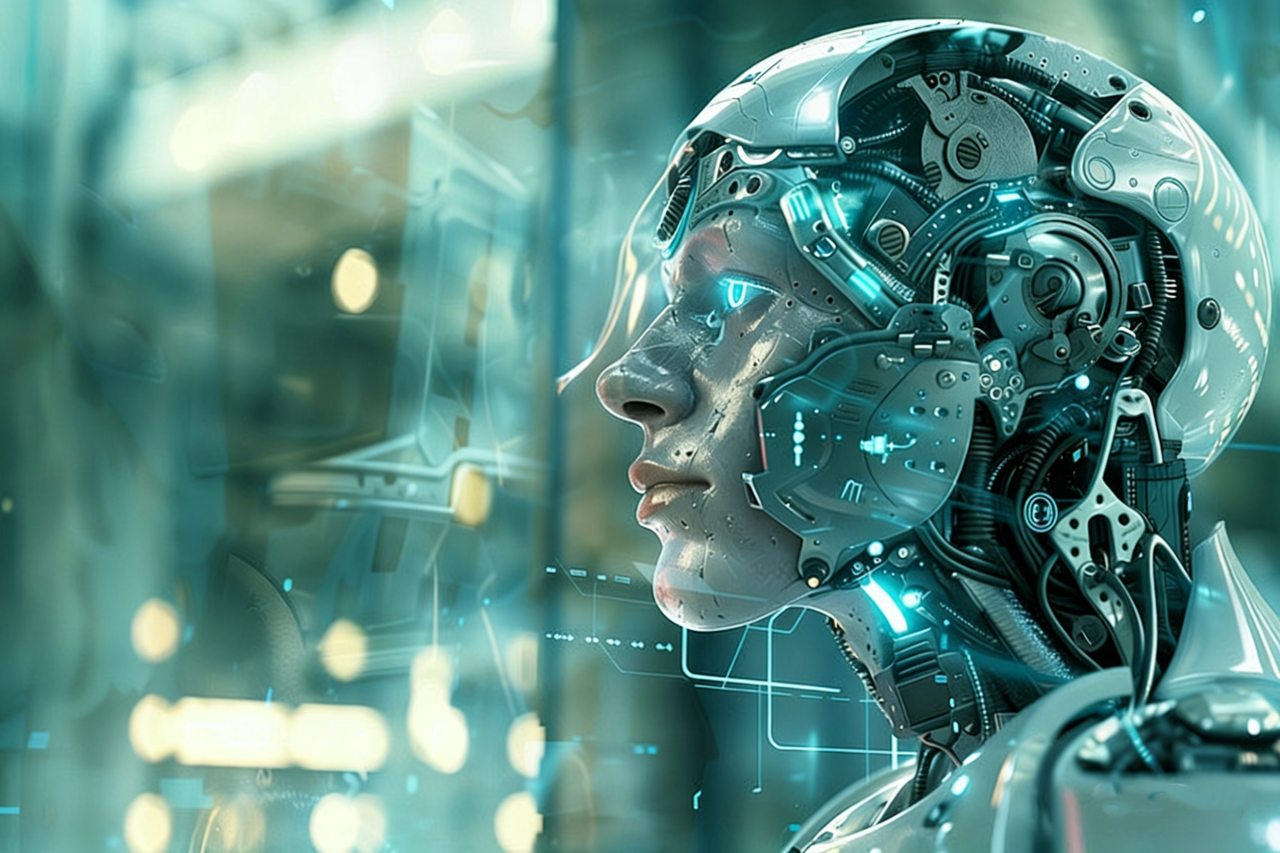
Aprovechando su profundo conocimiento de materiales, Qingmei Zhisu, en colaboración con Linkerbot, ha introducido con éxito el plástico de ingeniería de alto rendimiento PEEK (poliéter éter cetona) en la estructura portante principal de los reductores cicloidales. Esto va mucho más allá de una simple sustitución de material. Representa un rediseño fundamental a nivel de sistema, donde el PEEK actúa como material estructural principal de transmisión de carga, redefiniendo la arquitectura interna del reductor.
Esta innovación ofrece importantes ventajas de rendimiento:
- Reducción sustancial de peso: reduce considerablemente la masa articular, mejorando la densidad de potencia y la respuesta dinámica.
- Amortiguación de vibraciones y ruido reducido: la amortiguación inherente del material reduce eficazmente el ruido y la vibración operativos, mejorando la estabilidad del sistema.
- Autolubricante y resistente a la corrosión: reduce los requisitos de lubricación y amplía los escenarios de aplicación en entornos hostiles.
- Moldeo integrado: estructuras complejas formadas en una sola pieza mediante moldeo por inyección de precisión, lo que reduce el número de piezas y mejora la confiabilidad general.
Con este producto, el valor del PEEK ya no se mide en kilogramos, sino en el rendimiento articular. Un solo robot humanoide suele tener entre 20 y 30 articulaciones. Posiciones de alta carga, como caderas, rodillas, hombros y codos, pueden adoptar esta solución, lo que abre amplias posibilidades para aplicaciones multipunto a gran escala.
Este lanzamiento representa no solo un reductor revolucionario, sino también una plataforma tecnológica extensible. Marca el surgimiento de "Materiales de alto rendimiento + fabricación de precisión" como un nuevo paradigma para actualizar los componentes centrales de la robótica.
De cara al futuro, esta innovación se puede extender a robots colaborativos, robots de propósito especial y equipos de automatización de alta gama, formando gradualmente una matriz de productos basada en la integración de "materiales × estructura × carga," Ofreciendo continuamente soluciones más ligeras, más resistentes y más inteligentes para la industria.
Fabricación inteligente y ligera: más allá de la ligereza
Esta colaboración no es solo un avance en el producto, sino el inicio de una nueva vía industrial. Qingmei Zhisu seguirá trabajando con socios del ecosistema para impulsar la innovación de materiales y las mejoras en la fabricación de componentes centrales robóticos. Creemos que esto marca un nuevo punto de partida para la evolución de los componentes centrales robóticos hacia un peso más ligero, mayor resistencia y una mejor adaptación a las condiciones operativas del mundo real.